ロボットプログラミング教材ROBOTAMI エースラボシリーズ
STEM教育にART(アート)を加え「STEAM教育」へとブラッシュアップしたACE LABシリーズ。
 ROBOTAMI 「ACE LAB」(エースラボ)シリーズは、全4段階の構成で、パーツの種類をMICSシリーズから2倍の約100種に増やし、より高度な機械構造と意匠性を実現しました。
ROBOTAMI 「ACE LAB」(エースラボ)シリーズは、全4段階の構成で、パーツの種類をMICSシリーズから2倍の約100種に増やし、より高度な機械構造と意匠性を実現しました。
パーツやカラーリングを追加した事で、生徒たちはロボット組立てにおいて科学技術などのSTEM教育だけではなく、ロボットを美しく見せる「美的感覚」をも育むことになります。
見やすくなったテキスト
 テキストには全てフリガナがついており小学校低学年からでも学びやすくなっています。
テキストには全てフリガナがついており小学校低学年からでも学びやすくなっています。
組立図は全て3DCG で表現されており、組立て状況が解りやすくなっています。ページを開いた時、閉じて戻らない様にリング式ファイルを採用し、さらにめくりやすく加工する事で、組立て時でも片手だけでスムーズにめくれる様、工夫されています。
豊富なモジュール







ACE LAB1 概要

| 名称 | ACE LAB1(エースラボ1) |
| カリキュラム | 90分×12回 |
| モデル数 | 12モデル |
| テキスト | 日本語版A4フルカラー160ページ 英語版A4フルカラー160ページ |
| プログラミング | なし(内蔵された8プログラムを活用) |
| 備考 | パソコン不要 |
主な学習内容
- テコの原理
- 弾性エネルギー
- 表面張力
- 摩擦力
- ギヤの種類と特徴
- ギヤの働き
- フックの法則
- はかりの種類
- 昆虫の成長
- フレミングの左手の法則
- 車輪の役割りと発展過程
- トラス構造
- 可動橋の種類
- リンク機構
- 犬の役割り
- 風が吹く仕組み
- 再生可能エネルギー
- 昆虫の特徴
- 接触センサーによる方向転換
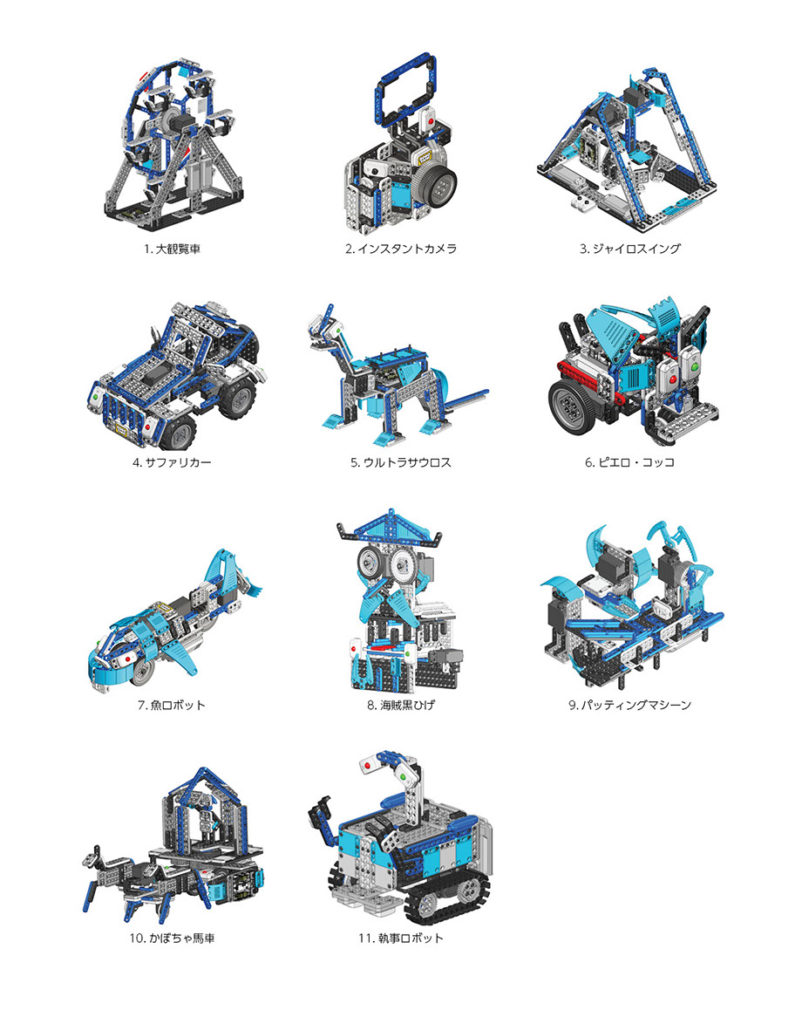
組立てモデル
ACE LAB2 概要

| 名称 | ACE LAB2(エースラボ2) |
| カリキュラム | 90分×12回 |
| モデル数 | 12モデル |
| テキスト | 日本語版A4フルカラー185ページ 英語版A4フルカラー185ページ |
| プログラミング | なし(内蔵された8プログラムを活用) |
| 備考 | エースラボ1も必要 パソコン不要 |
主な学習内容
- 産業用ロボット
- 慣性の法則
- 自転車について調べる
- チェーン伝動
- 遊具の科学原理
- 遠心力
- 機械装置「カム」
- 自動ドアの仕組み
- 摩擦伝動
- 時計の仕組み
- 時計ロボットのギヤ
- 音センサーの仕組み
- 音センサーでロボットを動かす
- 農業用ロボット
- ベルト伝動
- 恐竜の種類
- リモコンの仕組み
- 家庭用ロボット
- 赤外線センサーの仕組み
- カブトムシについて
- ライントレースの仕組み
- サポートロボット
- サーボモーターの仕組み
- ロボットを使った競技
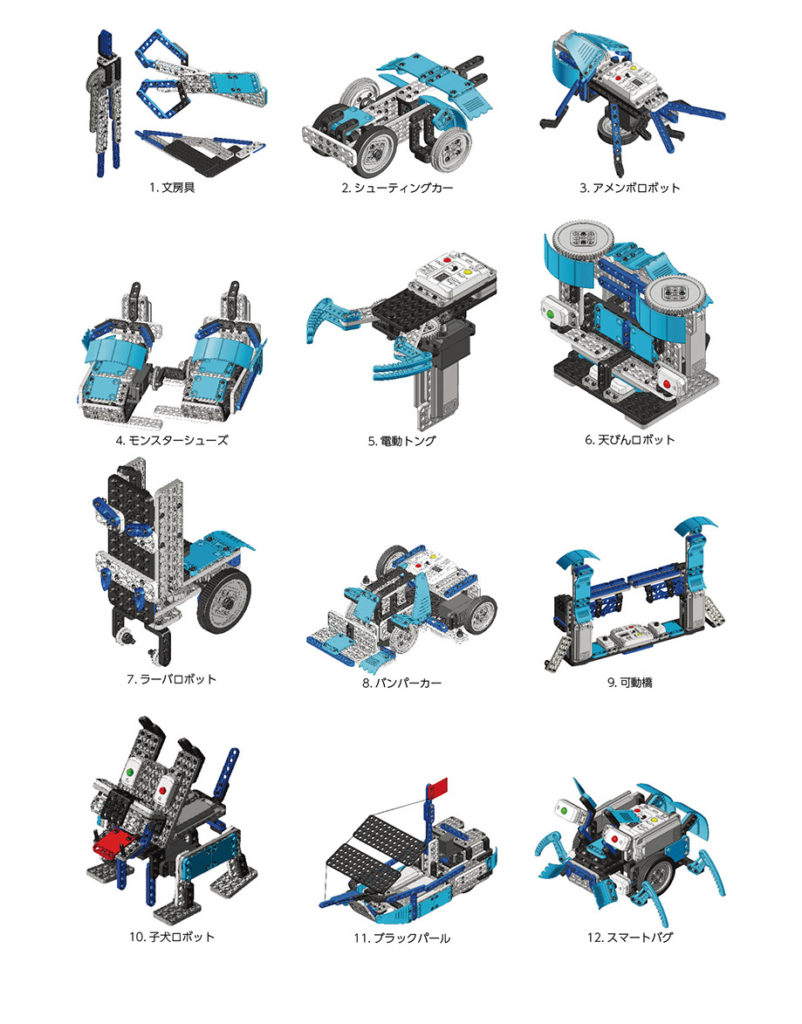
組立てモデル
ACE LAB3 概要

| 名称 | ACE LAB3(エースラボ3) |
| カリキュラム | 90分×12回 |
| モデル数 | 10モデル |
| テキスト | 日本語版A4フルカラー199ページ 英語版A4フルカラー186ページ |
| プログラミング | あり |
| 備考 | エースラボ1、2も必要 付属のオリジナル専用端末TAMI-TOOL またはパソコン |
主な学習内容
- LED を制御してモールス符号でSOS 信号を作る
- FOR とNEXT を使ってのくり返し制御
- GO とBACK を使い前進・後進を制御
- LEFT とRIGHT を使い回転を制御
- CW、CCW を使いDC モーターを個別に制御
- LABEL とGOTO を使い無限ループを制御
- IF とEND IF を使って条件分岐
- 赤外線センサーモジュールを使った制御
- サーボモーターの角度を制御
- サーボモーターの速度を制御
- 音センサーを用いてロボットを制御
- ライントレース
- ロボット・プログラム創作
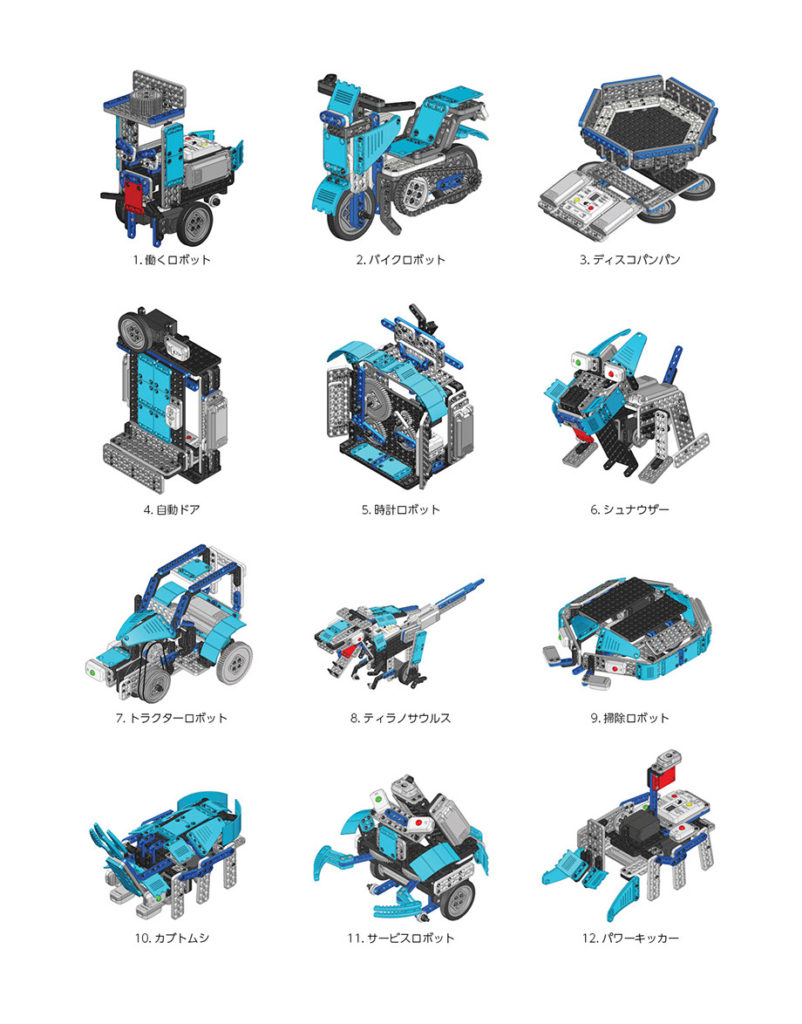
組立てモデル
ACE LAB4 概要

| 名称 | ACE LAB4(エースラボ4) |
| カリキュラム | 90分×12回 |
| モデル数 | 11モデル |
| テキスト | 日本語版A4フルカラー198ページ 英語版A4フルカラー184ページ |
| プログラミング | あり |
| 備考 | エースラボ1、2、3も必要 パソコン必要 |
主な学習内容
- 最高難易度の組立てを行なうことで観察力・空間認識力アップ
- 目的に合わせてプログラムを一から作る、または改変する
- ロボットの意匠性を意識し感性を磨く
- 傾斜センサーモジュールの仕組み
- 光センサーモジュールを使う
- ブザーモジュールで音を出す
- キャタピラを使った無限軌道
- ロボット・プログラム創作
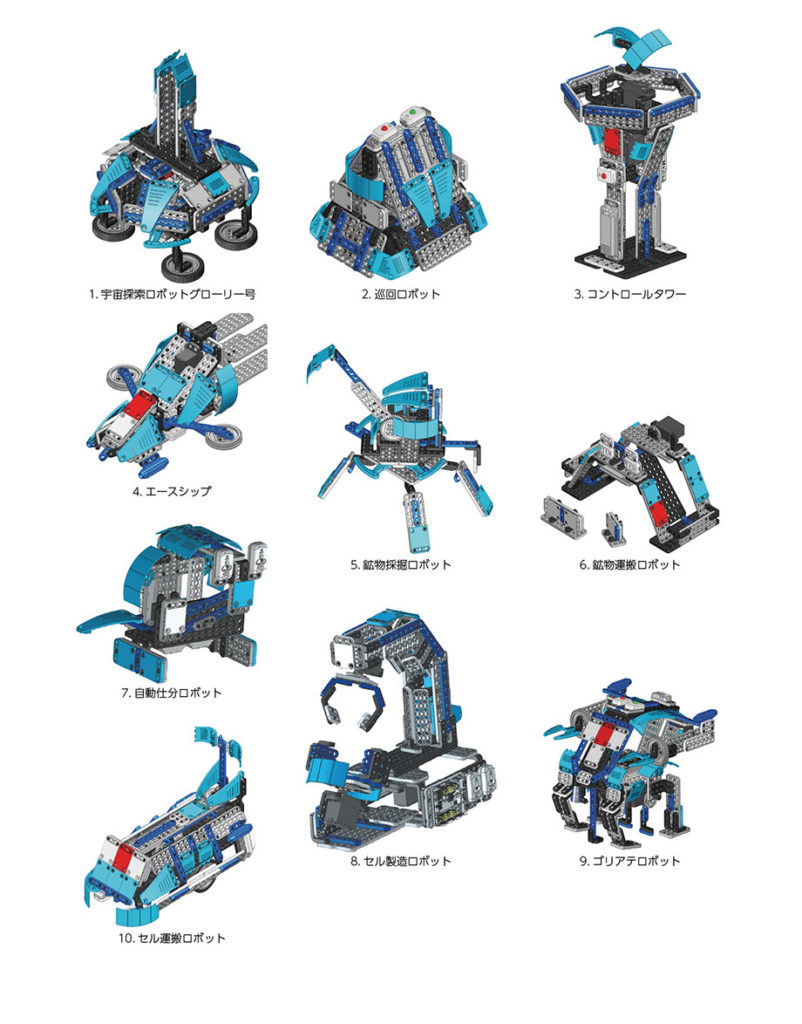
組立てモデル